Makmal Sistem Kenderaan Pintar
Pada masa ini, penyelidikan di dalam makmal ini memberi fokus kepada bidang-bidang berikut:
Kenderaan Bergerak Secara Vision-based Autonomous
- Sasaran pengesanan menggunakan aliran optik
Dalam penyelidikan ini, pengesanan sasaran dilakukan dengan menggunakan kaedah piramid Lucas-Kanade untuk menganggarkan medan aliran optik daripada urutan imej yang ditangkap oleh kamera. Medan aliran anggaran digunakan untuk menandakan objek dalam rangka imej. Dari imej yang ditangkap, lokasi piksel objek yang ditandakan digunakan untuk menganggarkan laluan kenderaan yang dikehendaki. Proses ini diulang secara berterusan sehingga kenderaan menumpu dengan objek yang dikesan.

- Perancangan laluan autonomous dan elakkan halangan
Data visual digunakan untuk menangkap persekitaran di mana kenderaan itu bergerak. Dari imej yang ditangkap, halangan dikenal pasti dan jalan yang optimum untuk sampai ke destinasi akhir ditentukan. Ini dilakukan dengan menggunakan gabungan pemprosesan imej, penjanaan pelan hala tuju dan teknik pengoptimuman.
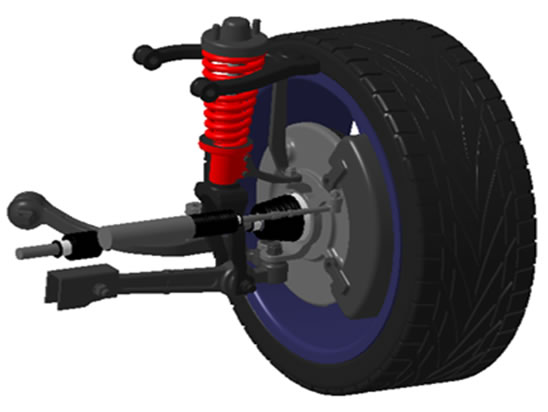
Reka Bentuk Suspensi Aktif
- Reka bentuk pengawalan untuk sistem suspensi aktif
Suspensi kenderaan diperlukan untuk melakukan tugas-tugas di persekitaran yang berbeza-beza dan memerlukan ciri-ciri yang berlainan. Kaedah kawalan tersuai dilihat mampu menyediakan penyelesaian kepada masalah ini dengan mengubah ciri-ciri kekakuan dan redaman mengikut keadaan operasi. Walau bagaimanapun, kaedah kawalan tersuai terdedah kepada variasi parameter yang tidak dijangkan. Kaedah Multiple Model Adaptive Control (MMAC) dan Polynomial Chaos Expension (PCE) sedang dikaji untuk dilaksanakan ke atas suspensi aktif.
- Alat pengoptimuman reka bentuk suspensi
Satu alat untuk mengoptimumkan reka bentuk suspensi sedang dibangunkan menggunakan platform SimulationX / Modelica.
Kestabilan dan Kebolehstabilan Kenderaan
Kenderaan moden dijangka dapat bertindak balas dengan cepat kepada perubahan pemanduan secara tiba-tiba , sebagai contoh, apabila melanggar cebisan basah di atas jalan raya yang kering atau dalam keadaan kecemasan apabila kereta membrek dan belokkan keras. Situasi seumpama ini akan membawa kepada pensuisan secara tiba-tiba dalam sistem dinamik. Kestabilan adalah satu kebimbangan utama dalam kes-kes seperti ini. Buat masa ini, kerja sedang dijalankan bagi membangunkan kaedah dan alat-alat, dengan menggunakan platform Maple dan MATLAB, untuk mereka bentuk pengawal yang dapat memastikan kestabilan kenderaan apabila menjalani peralihan dinamik secara tiba-tiba.